新火种
2023-12-20
新火种
2023-12-20 


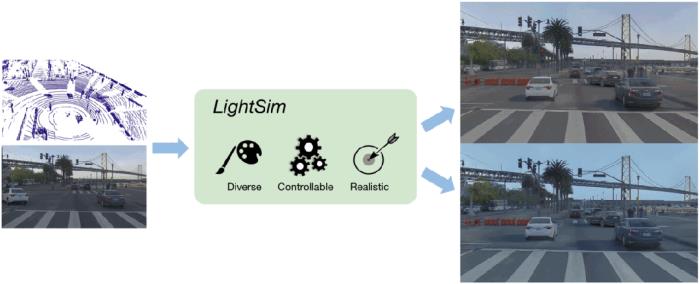
真实、可控、可拓展,自动驾驶光照仿真平台LightSim上新了
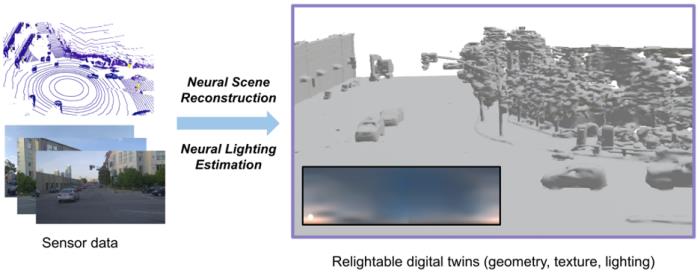
最近,来自 Waabi AI、多伦多大学、滑铁卢大学和麻省理工的研究者们在 NeurIPS 2023 上提出了一种全新的自动驾驶光照仿真平台 LightSim。研究者们提出了从真实数据中生成配对的光照训练数据的方法,解决了数据缺失和模型迁移损失的问题。LightSim 利用神经辐射场(NeRF)和基于物理的深度网络渲染车辆驾驶视频,首次在大规模真实数据上实现了动态场景的光照仿真。
 除了材料和几何,LightSim 还能够根据室外白天场景的主要光源太阳和天空,估算室外照明,得到高动态范围的环境图(HDR Sky dome)。借助传感器数据和提取的几何体,LightSim 可以估算出一个不完整的全景图像,然后补全它,获得一个全方位 360° 的天空视图。从而利用这个全景图像和 GPS 信息生成 HDR 环境图,准确估算出太阳强度、太阳方向和天空外观。
除了材料和几何,LightSim 还能够根据室外白天场景的主要光源太阳和天空,估算室外照明,得到高动态范围的环境图(HDR Sky dome)。借助传感器数据和提取的几何体,LightSim 可以估算出一个不完整的全景图像,然后补全它,获得一个全方位 360° 的天空视图。从而利用这个全景图像和 GPS 信息生成 HDR 环境图,准确估算出太阳强度、太阳方向和天空外观。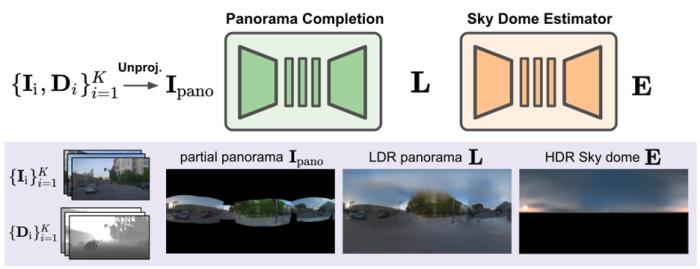
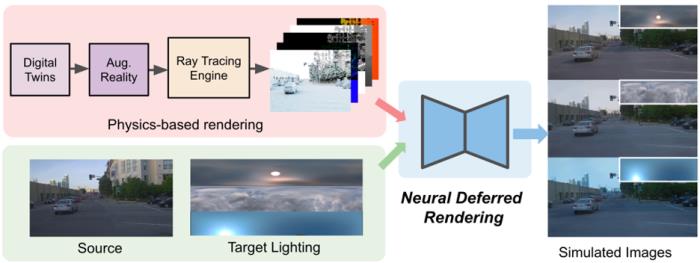
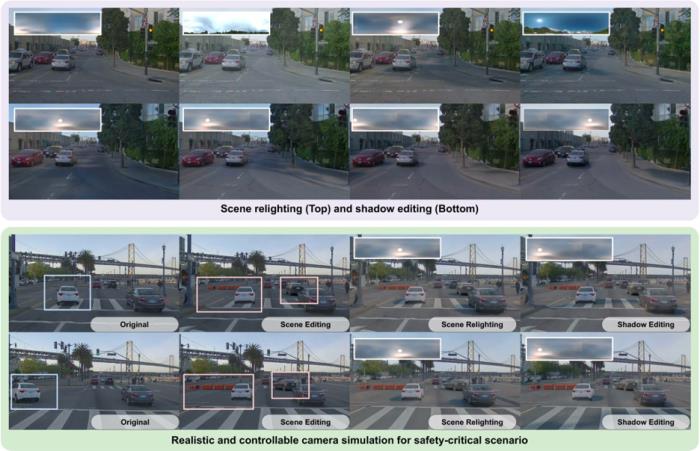
 LightSim 可以批量地进行场景重新照明,从估计的和真实的 HDR 环境图中生成同一场景的新的时间一致的和可 3D 感知的照明变化。
LightSim 可以批量地进行场景重新照明,从估计的和真实的 HDR 环境图中生成同一场景的新的时间一致的和可 3D 感知的照明变化。 阴影编辑 (Shadow Editing)LightSim 的照明表示是可编辑的,可以改变太阳的方向,从而更新与太阳光方向相关的照明变化和阴影。LightSim 通过旋转 HDR 环境图并将其传递给神经延迟渲染模块以生成以下视频。
阴影编辑 (Shadow Editing)LightSim 的照明表示是可编辑的,可以改变太阳的方向,从而更新与太阳光方向相关的照明变化和阴影。LightSim 通过旋转 HDR 环境图并将其传递给神经延迟渲染模块以生成以下视频。 LightSim 也可以批量地进行阴影编辑。
LightSim 也可以批量地进行阴影编辑。 可感知光照的物体添加 (Lighting-Aware Actor Insertion)除了修改照明之外,LightSim 还可以对不常见的对象(例如建筑障碍物)执行照明感知的添加。这些添加的对象可以更新物体的照明阴影、做到准确遮挡物体以及与整个相机配置的空间适配。
可感知光照的物体添加 (Lighting-Aware Actor Insertion)除了修改照明之外,LightSim 还可以对不常见的对象(例如建筑障碍物)执行照明感知的添加。这些添加的对象可以更新物体的照明阴影、做到准确遮挡物体以及与整个相机配置的空间适配。 仿真迁移 (Generalization to nuScenes)由于 LightSim 的神经延迟渲染网络是在多个驾驶视频上进行训练的,因此 LightSim 可以推广到新场景中。以下视频展示了 LightSim 泛化到 nuScenes 中的驾驶场景的能力。LightSim 可以为每个场景构建照明感知数字孪生,然后应用于在 PandaSet 上预训练的神经延迟渲染模型。LightSim 迁移性能良好,并且可以较为鲁棒地为场景重新照明。
仿真迁移 (Generalization to nuScenes)由于 LightSim 的神经延迟渲染网络是在多个驾驶视频上进行训练的,因此 LightSim 可以推广到新场景中。以下视频展示了 LightSim 泛化到 nuScenes 中的驾驶场景的能力。LightSim 可以为每个场景构建照明感知数字孪生,然后应用于在 PandaSet 上预训练的神经延迟渲染模型。LightSim 迁移性能良好,并且可以较为鲁棒地为场景重新照明。 真实可控的相机仿真综合以上展示的所有功能,LightSim 实现了可控、多样化且逼真的相机模拟。以下视频展示了 LightSim 的场景仿真性能。在视频中,一辆白色的车紧急变道至 SDV 车道,引入了新的路障,这使得白色车辆进入了产生一个全新的场景,在新场景的多种照明条件下 LightSim 生成的效果如下所示。
真实可控的相机仿真综合以上展示的所有功能,LightSim 实现了可控、多样化且逼真的相机模拟。以下视频展示了 LightSim 的场景仿真性能。在视频中,一辆白色的车紧急变道至 SDV 车道,引入了新的路障,这使得白色车辆进入了产生一个全新的场景,在新场景的多种照明条件下 LightSim 生成的效果如下所示。 以下视频中展示了另一个实例,插入了新的道路障碍后,又添加了一组新的车辆。使用 LightSim 搭建的仿真光照,让新加入的车辆能够无缝地融入到场景中。
以下视频中展示了另一个实例,插入了新的道路障碍后,又添加了一组新的车辆。使用 LightSim 搭建的仿真光照,让新加入的车辆能够无缝地融入到场景中。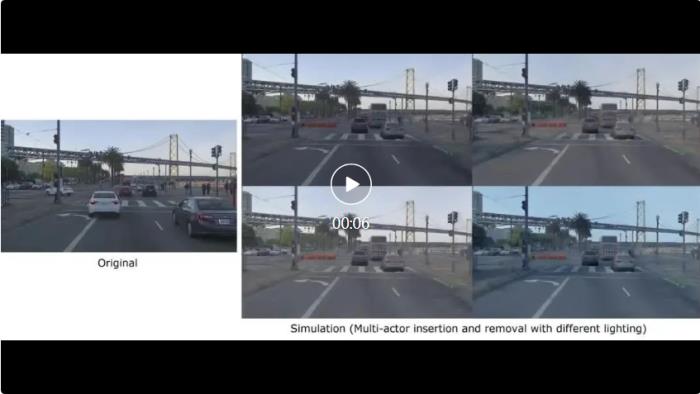 总结和展望LightSim 是一个可感知光照的相机仿真平台,为处理大规模动态驾驶场景服务。它可以根据现实世界的数据构建可感知照明的数字孪生体,并对其进行修改,以创建具有不同物体布局、SDV 视角的新场景。LightSim 能够对场景模拟新的照明条件以实现多样化、真实且可控的相机仿真,从而生成时间 / 空间一致的视频。值得注意的是,LightSim 还可以结合逆向渲染、天气模拟等技术来进一步提升仿真性能。
总结和展望LightSim 是一个可感知光照的相机仿真平台,为处理大规模动态驾驶场景服务。它可以根据现实世界的数据构建可感知照明的数字孪生体,并对其进行修改,以创建具有不同物体布局、SDV 视角的新场景。LightSim 能够对场景模拟新的照明条件以实现多样化、真实且可控的相机仿真,从而生成时间 / 空间一致的视频。值得注意的是,LightSim 还可以结合逆向渲染、天气模拟等技术来进一步提升仿真性能。 相关推荐



- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。