新火种
2025-02-21
新火种
2025-02-21 


智元机器人联合北大,推出通用机器人操作框架
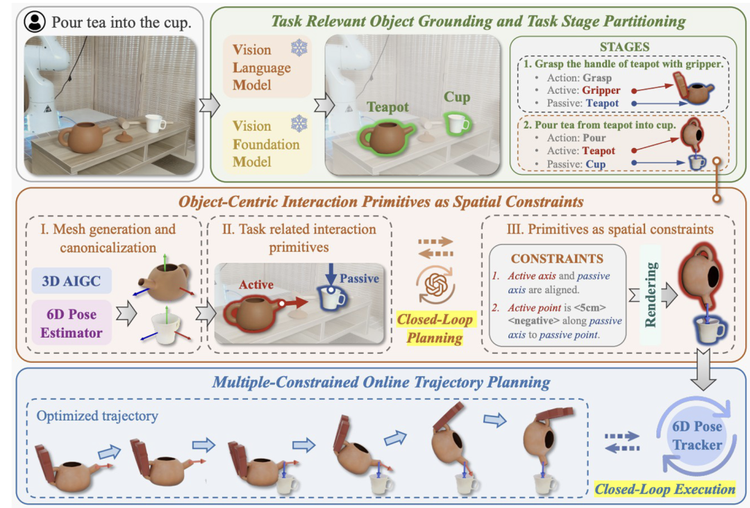
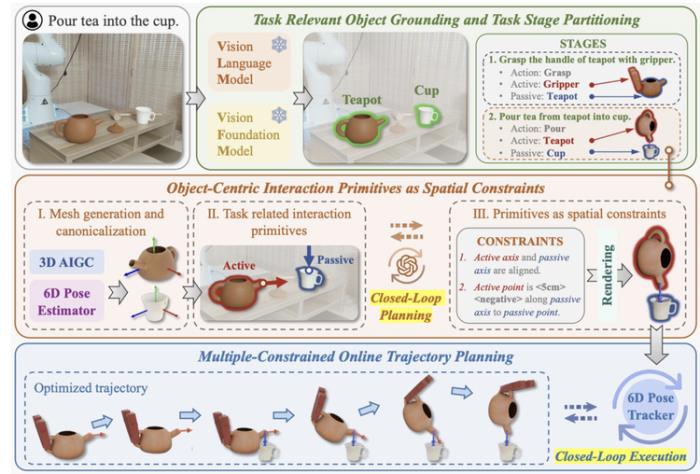
品玩1月24日讯,据智元机器人官方消息,北京大学联手智元机器人,推出OmniManip 架构,基于以对象为中⼼的 3D 交互基元,将 VLM 的高层次推理能力转化为机器⼈的低层次高精度动作。
据了解,智元机器人与北京大学联合实验室为解决「视觉语⾔基础模型(VLMs)如何应⽤于机器⼈,以实现通⽤操作」这一具身智能领域的难题,携⼿提出了「OmniManip」架构。「OmniManip」基于以对象为中⼼的 3D 交互基元,将 VLM 的高层次推理能力转化为机器⼈的低层次高精度动作。
针对⼤模型幻觉问题和真实环境操作的不确定性,OmniManip 创新性地引⼊了 VLM 规划和机器⼈执⾏的双闭环系统设计,实现了操作性能的显著突破。实验结果表明,OmniManip 作为⼀种免训练的开放词汇操作⽅法,在各种机器⼈操作任务中具备强⼤的零样本泛化能⼒。
相关推荐




- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。