清华大学取得多模式抓取并联连杆复合自适应机器人手指装置专利,能自适应抓取不同形状尺寸物体
据国家知识产权局公告,清华大学取得一项名为“多模式抓取并联连杆复合自适应机器人手指装置“,授权公告号CN109129530B,申请日期为2018年9月。专利摘要显示,多模式抓取并联连杆复合自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、两个关节轴、
据国家知识产权局公告,清华大学取得一项名为“多模式抓取并联连杆复合自适应机器人手指装置“,授权公告号CN109129530B,申请日期为2018年9月。专利摘要显示,多模式抓取并联连杆复合自适应机器人手指装置,属于机器人手技术领域,包括基座、两个指段、两个关节轴、

人民网北京10月28日电(记者孙竞)26日,北京市视觉科学与转化医学研究中心(BERI)在清华大学成立。据介绍,中心将从光学、神经科学、药学、材料科学、信息科学、数字医学、人工智能、眼科学等大量交叉学

“计算机发展正面临一个非常重要的变化,就是我们正在步入的泛在计算,它一个重要特点是从人使用计算机变成机器使用计算机,对智能计算的要求越来越迫切。”9月14日,2023全球AI芯片峰会上,清华大学教授、中国半导体行业协会副理事长魏少军表示。 以大模型为代表的生成式AI年内大火,成为资本追逐的对象。

当下,大模型的进化似乎遇上了瓶颈。据报道,OpenAI的GPT-5项目开发已持续超过18个月,但面临着数据短缺、算力有限、人才流失的问题。 在基础模型发展可能放缓的背景下,AI企业也逐渐意识到,AI的价值必须通过具体应用才能实现。

人工智能金融界2023年11月30日消息,据国家知识产权局公告,清华大学申请一项名为“计算机视觉结构位移测量方法、系统、终端和存储介质“,公开号CN117128865A,申请日期为2023年7月。专利摘要显示,本发明公开了一种计算机视觉结构位移测量方法、系统、终端和存储介质,

据国家知识产权局公告,清华大学申请一项名为“推荐模型预估系统及其使用方法“,公开号CN117311960A,申请日期为2023年8月。专利摘要显示,本申请涉及推荐技术领域,提供一种推荐模型预估系统及其使用方法,系统应用于图形处理器GPU,

近日,清华大学集成电路学院教授吴华强、副教授高滨团队基于存算一体计算范式,研制出全球首颗全系统集成的、支持高效片上学习(机器学习能在硬件端直接完成)的忆阻器存算一体芯片,在支持片上学习的忆阻器存算一体
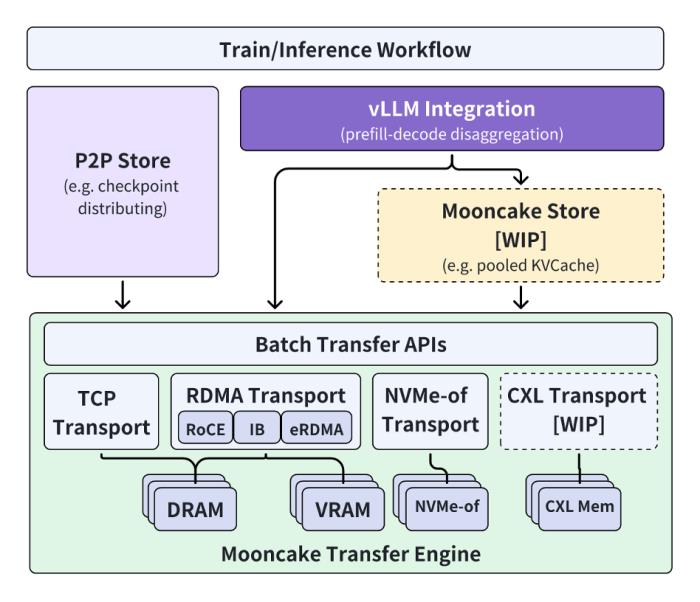
2024年6月,国内优质大模型应用月之暗面Kimi与清华大学MADSys实验室(Machine Learning, AI, Big Data Systems Lab)联合发布了以 KVCache 为中心的大模型推理架构 Mooncake。通过使用以 KVCache 为中心的 PD 分离和以存换算架构

金融界2023年12月20日消息,据国家知识产权局公告,清华大学申请一项名为“一种多智能体强化学习智能决策方法及装置“,公开号CN117252252A,申请日期为2023年8月。专利摘要显示,本发明提供一种多智能体强化学习智能决策方法及装置。该方法包括:确定当前时间步下目标问题内多个智能体所在单元的

投资界11月18日消息,近日,北京行云集成电路(简称“行云”)宣布连续完成总额数亿元的天使轮及天使+轮融资,参与投资机构包括多家头部战略方及知名财务机构。行云集成成立于2023年8月,其核心团队主要来自清华大学及全球顶尖芯片公司,致力于研发下一代针对大模型推理场景的高效能GPU芯片。公司依托深厚的技