新火种
2024-03-30
新火种
2024-03-30 


独揽首届深圳(国际)人工智能环卫机器人大赛所有细分赛第一,酷哇科技深度技术解析
3月27日,由深圳市城市管理和综合执法局、深圳市工业和信息化局、深圳市科技创新局、深圳市交通运输局、深圳市中小企业服务局、深圳市宝安区人民政府联合主办的“首届深圳(国际)人工智能环卫机器人大赛”顺利闭幕。
深圳作为中国最具活力和创新力的城市之一,明确提出“成为全球新型智慧城市标杆”的发展目标。本次深圳国际人工智能环卫机器人大赛是深圳在智慧城市建设中迈出的标志性一步,也是深圳市政府在人工智能应用领域深入探索的又一典范。
一、实现大满贯:酷哇科技在所有细分赛中均拔得头筹
目前,国内拥有成熟的智慧环卫机器人应用产品的企业达到20家,在本届大赛中,共有16家企业参与角逐,这意味着80%的产品成熟应用的企业均积极投身此次大赛,其中包括:
传统环卫装备巨头:盈峰环境、福龙马、北京环卫;
自动驾驶科技企业:酷哇科技、仙途智能、挚途科技、城市之光;
服务型机器人企业:赛特智能、犀牛智行、坎德拉。
经过4天的激烈角逐,酷哇科技在公园广场,辅道,人行道及非机动车道三个赛道脱颖而出,成功包揽所有赛道第一名!


比赛中,酷哇科技全方位展示了行业领先的L4级自动驾驶技术以及优异的无人化环卫作业装备技术,以极佳的产品表现给评委留下了深刻印象,各项考核指标均领先对手,为全行业和全球观众展示了酷哇科技在自动驾驶技术上的创新应用成果,以及安全高效、灵活可靠的人工智能环卫机器人产品,可以说代表了目前行业技术的最高水平。

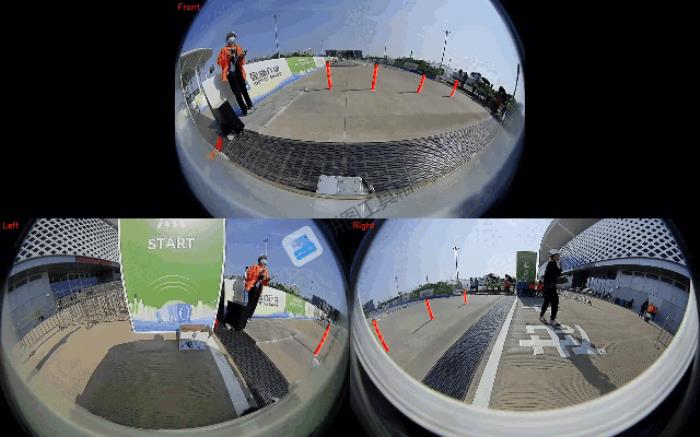
酷哇独角兽清扫机器人—过窄桩入场

酷哇独角兽清扫机器人—延边清扫

酷哇独角兽清扫机器人—上下坡越障

酷哇独角兽清扫机器人—垃圾识别追踪
酷哇本次参赛的“独角兽”系列清扫机器人是全球首款人行道无人清扫机器人,具备扫盘地面自适应调整、抑尘系统流量自适应,实时边沿检测和障碍感知,垃圾识别追踪清扫等功能,支持充电/换电两种模式,可实现24小时循环作业,相较传统环卫模式综合清扫效率大大提高,可作业于广场、人行道、非机动车道、市政园林、背街小巷、商业街区等城市公共场景。
二、深度技术解析:酷哇“独角兽”系列自动驾驶环卫机器人
本次大赛的赛事场地充分还原了公园广场、辅道、人行道及非机动车道等场景的真实面貌,设有全面的能力考核机制,包括:感知识别、避障绕障、沿边清扫、防缠绕、防跌落、灵活过弯、防震性、礼让行人、路口通行等各项能力检测。酷哇在这些场景取得领先的性能表现取决于其强大的硬件设计、AI算法以及系统集成能力。
(一)智慧环卫生态全息解决方案
1. 高性能自动驾驶整车:酷哇提供高性能自动驾驶整车,全面覆盖了人行道、辅道和机动车的环卫作业需求。这些自动驾驶作业车辆,经过了精心设计和优化,配备有先进的传感器、计算平台和驱动系统,可确保在各种道路条件下都能安全可靠地运行。同时搭载了“可线控、可诊断”的高性能作业上装,作业效率、能力以及时长均超过了传统的人工驾驶车辆。



酷哇1吨级别人行道清扫机器人 酷哇2吨级别辅道清扫机器人 酷哇18吨级别智能驾驶清扫车
2. 高算力控制器:控制器是自动驾驶系统的核心组件,负责实时监测车辆状态、处理传感器数据、执行路径规划并控制车辆动作。酷哇自研了超过1280Tops的第六代高算力平台,为"边缘端大模型"提供了丰富的算力基础,同时自研了高达32路相机以及8路高线束激光雷达的第七代传感器处理平台,实现了高精度的时空同步、数据黑匣子、冗余等自动驾驶核心硬件功能。
3. L4级别自动驾驶算法:酷哇的算法团队致力于研发和优化各种自动驾驶算法,包括感知、决策、规划等方面的算法。此算法通过深度学习、机器学习等技术,能够实现对周围环境的高效感知、准确决策和安全规划,从而确保车辆能够安全地行驶。不同于移动机器人解决方案,酷哇采取了“重感知、轻地图”、“大模型”等技术路线,依托于高算力、海量数据以及“大模型”,实现了高泛化、高精度、高级别的自动驾驶算法。
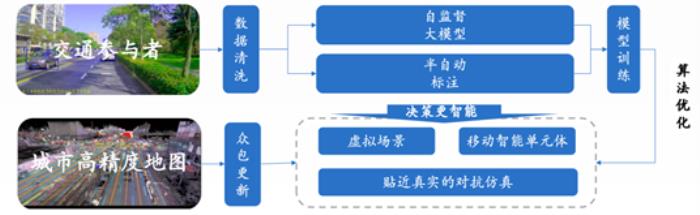
4. 数据闭环系统:数据是AI能力的基础,酷哇建立了完善的数据闭环系统,能够准实时收集处理传感器数据,并将这些数据用于算法的训练和优化。基于海量的运营车辆,以及半自动标注系统,酷哇已收集了超过30PB的高质量数据,并持续累计。
5.智慧环卫云:酷哇智慧环卫云平台是一个集成了管理、分析和监控功能的云端服务平台。通过环卫云平台,用户可以实时监控车辆的状态、运行情况和数据,进行数据分析和挖掘,并基于数据自动化或半自动化地对车辆进行调度,从而实现对车辆运营的全面管理和优化。

(二)引领视觉智能革新:基于ViT视觉大模型技术
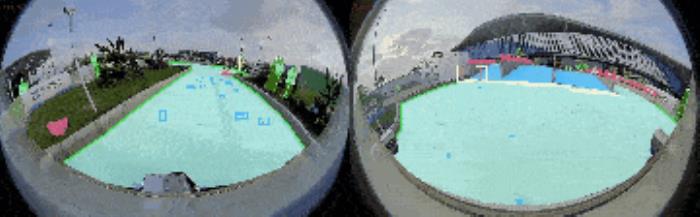
酷哇的视觉基础模型采用了ViT(Vision Transformer)架构,这是一项颠覆性的技术创新。通过海量的数据资源、伪真值系统和半监督学习,酷哇成功训练了一个强大的视觉大模型。它能够理解交通中的各种要素,包括人机非、交通标识、车道线、红绿灯、可行驶区域等,同时还具备感知路牙、垃圾等环卫相关的能力。
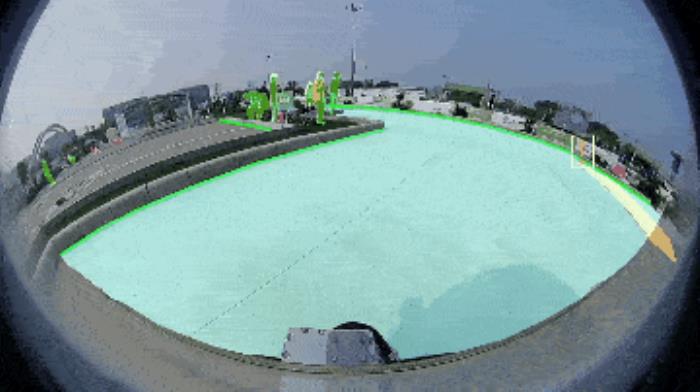
基于视觉大模型的语义分割
基于视觉大模型的垃圾检测追踪、沿边清扫
相比传统的CNN(Convolutional Neural Network),酷哇基于ViT的视觉模型具有明显的优势。首先,ViT模型能够更好地捕捉全局信息,从而提高了对复杂场景的理解能力。其次,ViT模型的参数效率更高,可以在更少的参数量下实现更好的性能,从而降低了计算成本并提高了运行效率。
此外,酷哇ViT视觉大模型还具有更强的泛化能力,可以适应各种复杂环境下的场景,使得酷哇的自动驾驶系统更加稳健可靠,并输出高质量的结果。以窨井盖缺失检测为例,酷哇ViT视觉大模型通过学习少量的数据样本进行FineTune,即可准确地识别出道路上缺失的窨井盖,为道路安全提供重要的监测和预警功能。这种灵活的泛化能力使得酷哇的自动驾驶系统能够在面对新的挑战和情境时迅速适应,并保持高效、准确的表现。
通过不断探索和优化视觉大模型基础模型,酷哇将进一步提升自动驾驶系统的感知和决策能力,为未来智能交通的发展做出更大的贡献。酷哇人坚信,视觉智能的革命将为我们的社会带来更安全、更便捷、更高效的出行体验。
(三)改变游戏规则:纯视觉逐步取代昂贵的激光雷达
激光雷达是自动驾驶系统中常用的传感器之一,但高昂的价格限制了其普及性和应用范围。为克服这一挑战,酷哇转向了更加量产化的纯视觉技术,并取得了令人瞩目的成果。酷哇产品的视觉感知能力不仅不逊于激光雷达,甚至在障碍物类别、召回率和检测范围等方面超越了传统的激光雷达技术。
通过将多目立体视觉技术巧妙地融入到BEV深度学习网络中,酷哇实现了与高端线束(128线)激光雷达相媲美的距离检测精度。这种创新性的方法不仅降低了成本,而且在保持高精度的同时扩展了感知范围,为自动驾驶技术的发展开辟了新的可能性。
通过采用纯视觉技术,酷哇不仅使自动驾驶系统更加可普及、可负担,同时也为行业带来了更高水平的性能和效率。但为确保更加可靠的安全冗余,酷哇的车身依然安装了激光雷达,确保在纯视觉以及Lidar任一失效时的人身安全。在未来,酷哇将不断推动技术创新,为构建更安全、更智能的驾驶体验做出贡献。

基于BEV的多目视觉3D检测

基于纯视觉高精度三维重构
(四)迈向AGI:端到端设计
传统的自动驾驶方案主要依赖模块化解耦和大量人工编写的专家系统规则,该方式往往导致信息在模块间传输时的丢失,并在处理时存在大量的不确定性。通过不断尝试,酷哇克服了传统方法所面临的种种困难,采用了一种全新的方法:通过对环境进行深度图像感知,直接设计驾驶行为策略,实现了端到端的智能驾驶方案。
与手工设计的专家系统相比,酷哇的方案在场景泛化和不确定性处理上表现明显更优异,更智能。酷哇的系统不仅仅是一堆模块的简单堆砌,而是一个整体性的解决方案,能够更加自然地适应各种驾驶场景。
在酷哇端到端的设计中,每一个部分都紧密相连,不存在信息丢失的问题。这使得自动驾驶系统更加高效、精准,并且更能够适应未知的情况。
1、从图像贯穿到控制
不同于高速公路的结构化环境,人行道、辅道上存在大量非结构化、狭窄区域,这对自动驾驶提出了极大的挑战。传统的分模块系统通常会先检测狭窄区域的边界,将这些边界投影到车辆自身坐标系下的三维空间,最后进行轨迹规划和控制以确保安全通过。然而,这种方法在实际中由于安全逻辑、传感器、AI算法、投影等环节引入的噪声,很难通过与自车大小接近的狭窄区域。与人类驾驶穿越狭窄区域的方式相似,酷哇设计了一种从视觉直接到控制的端到端算法,专门用于狭窄区域的驾驶。
该算法利用时序视觉基础模型的特征,并将地图先验信息和自车导航路线进行编码,最终解码出车辆未来一段时间的转向和行驶指令。通过模仿“老司机”的驾驶行为,基于仿真器中大量的模拟训练,酷哇成功地训练出了这一端到端算法。该算法使酷哇的自动驾驶车辆能够在仅比车身宽度大10厘米的狭窄区域中安全通行,与人类司机能力基本接近。

2、端到端自动驾驶策略
传统的驾驶策略通常基于手工规则生成,例如判断前方是否需要变道或者是否需要礼让。然而,基于规则的决策往往显得生硬,并且在场景泛化能力方面存在一定局限性。当面对复杂情况时,通常需要改写规则,但往往一个规则的修改可能会影响到其他规则的运行,导致开发和维护成本极高。
为了解决这一问题,酷哇采用了大语言模型(LLM)强大的推理能力,将延迟不敏感的驾驶策略通过端云一体化对驾驶场景进行深入理解,并生成车端拟人化的驾驶策略。通过端到端的驾驶策略,酷哇在公开道路复杂场景下有效提高了介入里程以及智能性。这一创新性的方法不仅提高了驾驶的自然性和智能性,还降低了开发和维护的成本,为智能交通领域带来了新的突破。

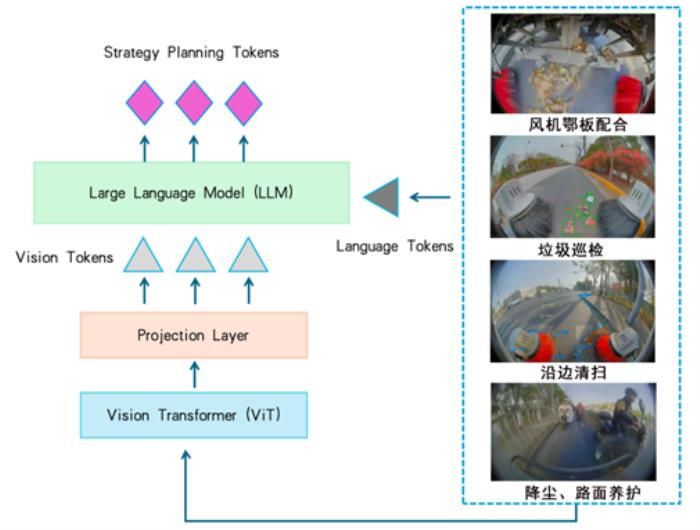
3、作业策略大模型
乘用车的低阶辅助驾驶和高阶自动驾驶通常着眼于行驶智能的提升,而酷哇则不仅关注行驶智能,还十分重视作业智能。酷哇自动驾驶作业机器人(车)通常具备多种功能,包括洗、吹、扫、吸、降尘等。决定在何种工况下需要使用哪些作业装置组合作业,例如是否需要降尘、是否需要增加风机功率等,以及在何种场景下选择何种作业模式,比如是否需要沿边清扫、是否需要遍历清扫、是否需要进行垃圾追踪等,这些决策都对作业质量和效率产生显著影响。
酷哇基于数据驱动的方法,将原始图像数据作为视觉令牌(Vision Token)输入到作业大模型中,通过作业大模型输出作业指令。这种方法不仅超越了人类司机的平均作业水准,而且能够在复杂环境中迅速作出准确的决策,从而提高了作业的质量和效率。
相关推荐




- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。