新火种
2024-01-05
新火种
2024-01-05 


大模型都会标注图像了,简单对话即可!
多模态大模型集成了检测分割模块后,抠图变得更简单了!
只需用自然语言描述需求,模型就能分分钟标注出要寻找的物体,并做出文字解释。
在其背后提供支持的,是新加坡国立大学NExT++实验室与清华刘知远团队一同打造的全新多模态大模型。
随着GPT-4v的登场,多模态领域涌现出一大批新模型,如LLaVA、BLIP-2等等。
为了进一步扩展多模态大模型的区域理解能力,研究团队打造了一个可以同时进行对话和检测、分割的多模态模型NExT-Chat。
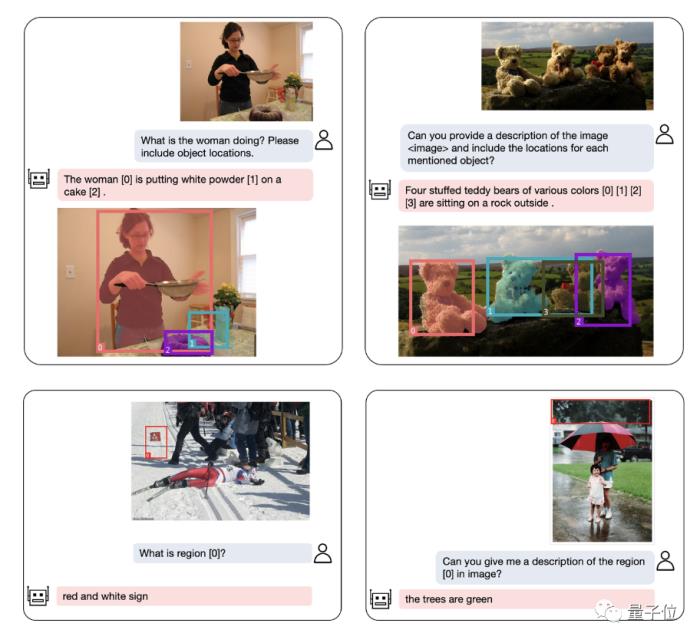
NExT-Chat的最大亮点,是在多模态模型中引入位置输入和输出的能力。
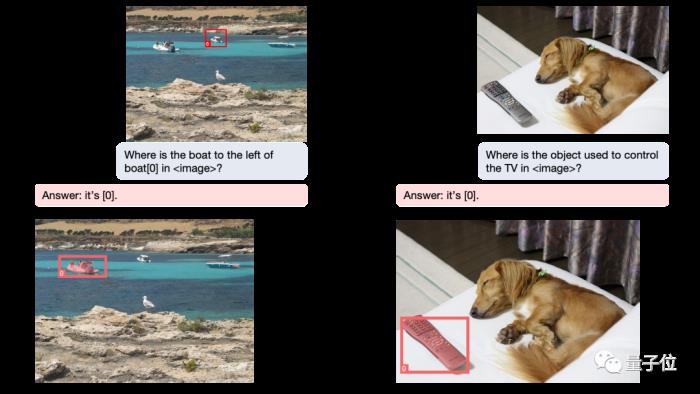
其中位置输入能力指的是根据指定的区域回答问题(下方左图);位置输出能力指的则是定位对话中提及的物体(下方右图):

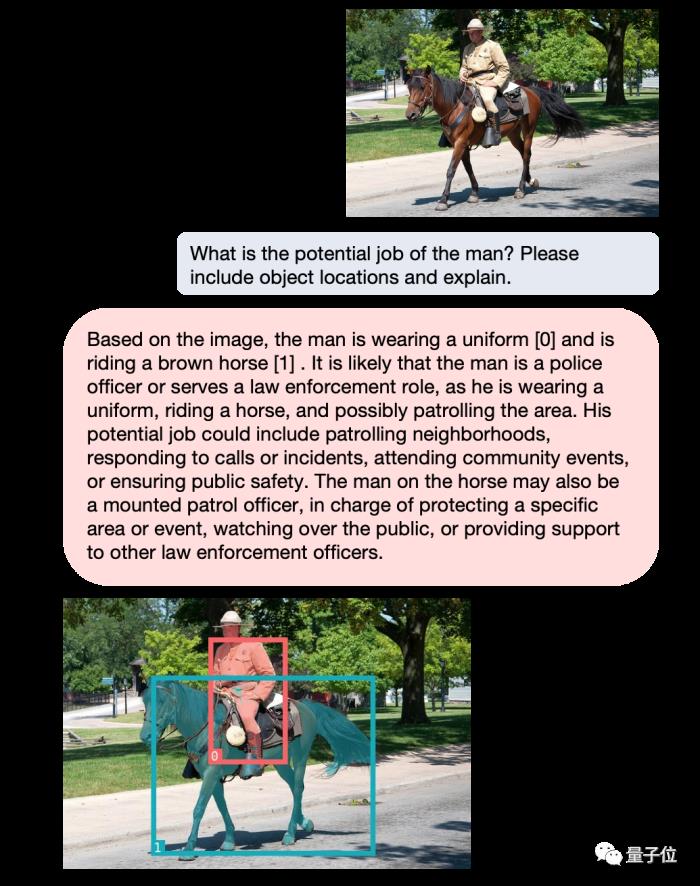
即使是复杂的定位问题,也能迎刃而解:
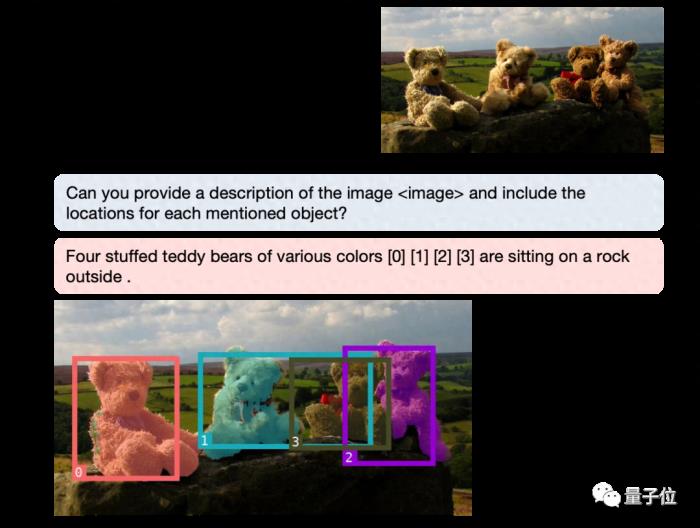
除了物体定位,NExT-Chat还可以对图片或其中的某个部分进行描述:
分析完图像的内容之后,NExT-Chat可以利用得到的信息进行推理:
为了准确评估NExT-Chat的表现,研究团队在多个任务数据集上进行了测试。
在多个数据集上取得SOTA作者首先展示了NExT-Chat在指代表达式分割(RES)任务上的实验结果。
虽然仅仅用了极少量的分割数据,NExT-Chat却展现出了良好的指代分割能力,甚至打败了一系列有监督模型(如MCN,VLT等)和用了5倍以上分割掩模标注的LISA方法。
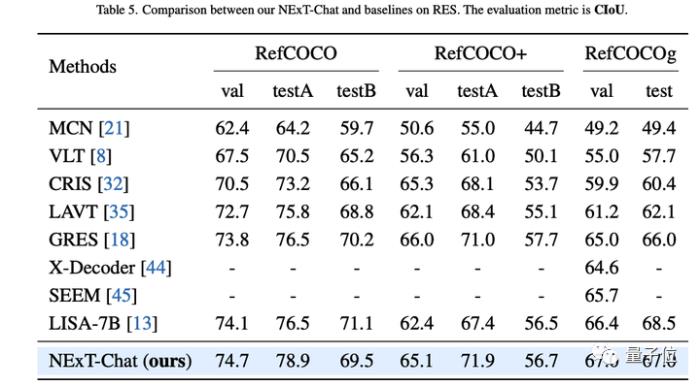
△RES任务上NExT-Chat结果
接着,研究团队展示了NExT-Chat在REC任务上的实验结果。
如下表所示,相比于相当一系列的有监督方法(如UNITER),NExT-Chat都可以取得更优的效果。
一个有意思的发现是NExT-Chat比使用了类似框训练数据的Shikra效果要稍差一些。
作者猜测,这是由于pix2emb方法中LM loss和detection loss更难以平衡,以及Shikra更贴近现有的纯文本大模型的预训练形式导致的。
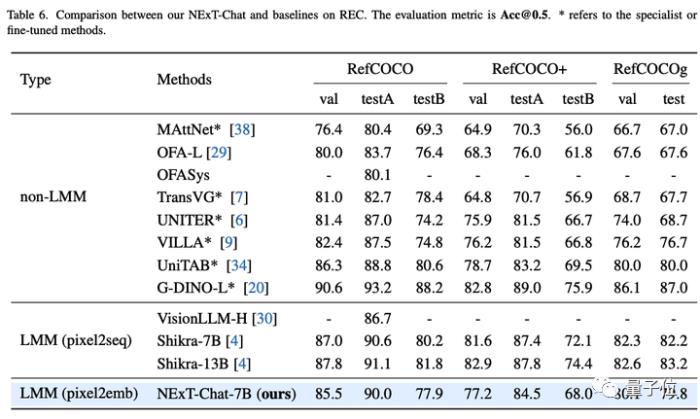
△REC任务上NExT-Chat结果
在图像幻觉任务上,如表3所示,NExT-Chat可以在Random和Popular数据集上取得最优的准确率。
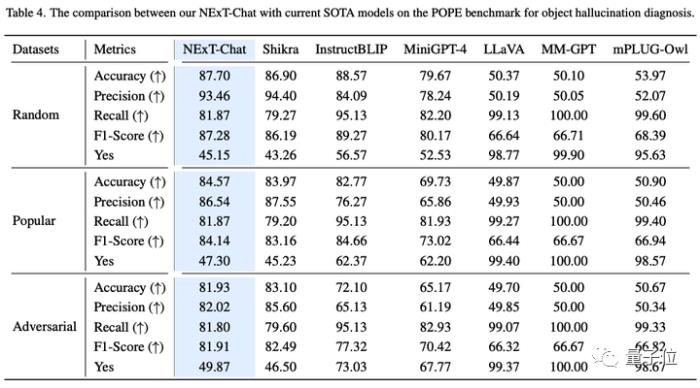
△POPE数据集上NExT-Chat结果
在区域描述任务上,NExT-Chat也能取得最优的CIDEr表现,且在该指标打败了4-shot情况下的Kosmos-2。

△RefCOCOg数据集上NExT-Chat结果
那么,NExT-Chat背后都采用了哪些方法呢?
提出图像编码新方式传统方法的缺陷
传统的模型主要通过pix2seq的方式进行LLM相关的位置建模。
比如Kosmos-2将图像划分成32×32的区块,用每个区块的id来代表点的坐标;Shikra将物体框的坐标转化为纯文本的形式从而使得LLM可以理解坐标。
但使用pix2seq方法的模型输出主要局限在框和点这样的简单格式,而很难泛化到其他更密集的位置表示格式,比如segmentation mask。
为了解决这个问题,本文提出了一种全新的基于embedding的位置建模方式pix2emb。
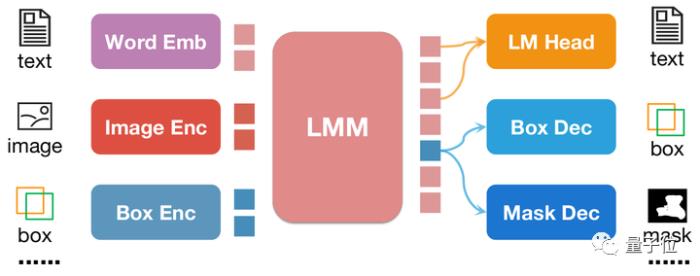
pix2emb方法
不同于pix2seq,pix2emb所有的位置信息都通过对应的encoder和decoder进行编码和解码,而不是借助LLM本身的文字预测头。
△pix2emb方法简单示例
如上图所示,位置输入被对应的encoder编码为位置embedding,而输出的位置embedding则通过Box Decoder和Mask Decoder转化为框和掩模。
这样做带来了两个好处:
模型的输出格式可以非常方便的扩展到更多复杂形式,比如segmentation mask。模型可以非常容易的定位任务中已有的实践方式,比如本文的detection loss采用L1 Loss和GIoU Loss (pix2seq则只能使用文本生成loss),本文的mask decoder借助了已有的SAM来做初始化。通过将pix2seq与pix2emb结合,作者训练了全新的NExT-Chat模型。
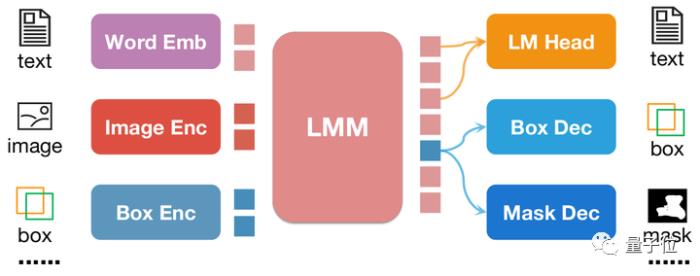
NExT-Chat模型
△NExT-Chat模型架构
NExT-Chat整体采用了LLaVA架构,即通过Image Encoder来编码图像信息并输入LLM进行理解,并在此基础上添加了对应的Box Encoder和两种位置输出的Decoder。
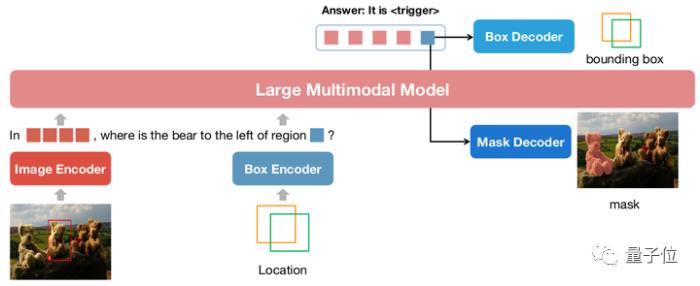
为了解决LLM不知道何时该使用语言的LM head还是位置解码器的问题,NExT-Chat额外引入一个全新的token类型来标识位置信息。
如果模型输出了,则该token的embedding会被送入对应的位置解码器进行解码而不是语言解码器。
此外,为了维持输入阶段和输出阶段位置信息的一致性,NExT-Chat额外引入了一个对齐约束:
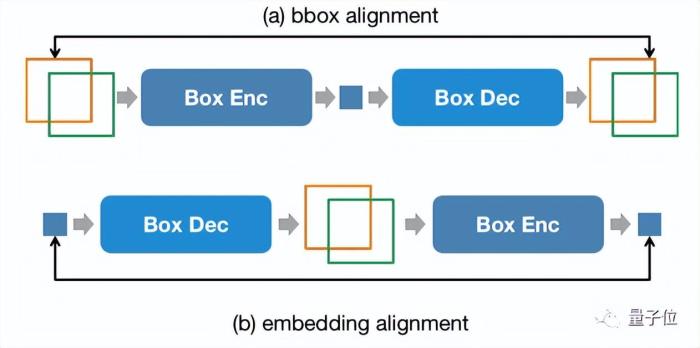
△位置输入、输出约束
如上图所示,box和位置embedding会被分别通过解码器、编码器或解码器编码器组合,并要求前后不发生变化。
作者发现该方法可以极大程度促进位置输入能力的收敛。
而NExT-Chat的模型训练主要包括3个阶段:
第一阶段:训练模型基本的框输入输出基本能力。NExT-Chat采用Flickr-30K,RefCOCO,VisualGenome等包含框输入输出的数据集进行预训练。训练过程中,LLM参数会被全部训练。第二阶段:调整LLM的指令遵循能力。通过一些Shikra-RD,LLaVA-instruct之类的指令微调数据使得模型可以更好的响应人类的要求,输出更人性化的结果。第三阶段:赋予NExT-Chat模型分割能力。通过以上两阶段训练,模型已经有了很好的位置建模能力。作者进一步将这种能力扩展到mask输出上。实验发现,通过使用极少量的mask标注数据和训练时间(大约3小时),NExT-Chat可以快速的拥有良好的分割能力。这样的训练流程的好处在于:检测框数据丰富且训练开销更小。
NExT-Chat通过在充沛的检测框数据训练基本的位置建模能力,之后可以快速的扩展到难度更大且标注更稀缺的分割任务上。
相关推荐




- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。