新火种
2023-12-26
新火种
2023-12-26 

科学家提出基于昆虫大脑时空记忆学习模型,为类脑智能提供新视角
Meta 首席人工智能科学家杨立昆(Yann LeCun)曾指出,当前 AI 智能遭遇瓶颈。他认为,大型语言模型并非真的理解世界知识。
那么,从其他角度来理解世界,有怎样的可能性呢?
近期,英国爱丁堡大学团队从生物学和神经科学角度出发,提出基于蚂蚁大脑时空记忆学习模型,为理解人脑智能提供了新视角。

图丨朱乐在实验室和昆虫机器人的合照(来源:朱乐)
该研究第一作者兼通讯作者、爱丁堡大学朱乐博士表示,该研究的意义在算法层面的提升以及硬件层面的创新。
具体来说,算法层面的创新在于,基于 GPS 或地图定位的导航方法,需要具备精准的实时定位,需要对全局地图进行存储,并不适用于所有机器人硬件。
基于序列图片的机器视觉匹配技术 SeqSLAM 由于考虑了图片的序列关系,可以提升匹配的准确度。“但是,通常更加是适配超长路径采集的数据集,需要图片采样时间更加离散,帧与帧之间图片差距大,才能不产生误判断。”朱乐表示。
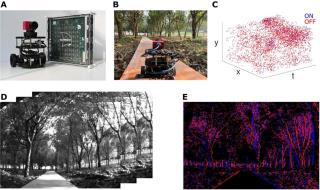
在硬件创新方面,研究人员采用了类脑计算平台(neuromorphic computer)和拟生物视觉的事件相机(event based camera)。事件相机可以在超高时间精度上(纳秒级别)进行像素变化的异步传感。
通过使用英国曼彻斯特大学研发的类脑计算机 SpiNNaker,该系统一方面可以将脉冲神经网络的训练和运行速度提升百倍,达到实时输入及输出的效果。另一方面,也极大地降低了功耗,相较于 GPU 的动则几百瓦(W)的功耗,该机器的单芯片功耗只有 1W 左右。
在当下大模型大参数应用盛行的时代,硬件价格和超高功耗使大模型研究成本过高。在思考如何将模型做大做强的同时,另一个研究方向是如何做出“小而美”的智能机器。

以昆虫大脑作为灵感来源
磨菇体/蕈状体(mushroom body)是昆虫大脑中的学习中心和记忆中心。研究人员对磨菇体中凯尼恩细胞之间的新发现的横向连接,做了假设并验证。
近年来,在磨菇体的研究过程中,神经学家发现一种新型的连接,即神经元的轴突和轴突之间有横向连接,这种连接可以在同层神经元之间的输出端互相影响,在不影响神经元输入和计算过程的条件下,改变神经元的输出值。

图丨 A、B:常见的轴突到树突的神经突触结构,C、D:新型轴突对轴突连接(来源:Science Robotics)
这种新型横向连接的神经学作用此前未被验证,同时由于精度太高,现有神经学研究手段很难直接对这种连接进行直接操作,去验证它的功能,生物神经网络的价值因此凸显。
该课题组在前人研究的磨菇体神经网络中,加入了这种新型连接,验证其在学习连续时空记忆中的作用,并和昆虫的导航行为学结合,搭建了机器人模型。
(来源:PLoS computational biology)
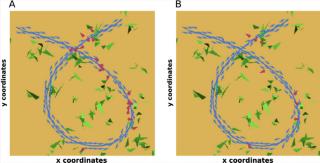
在前人基于蘑菇体建模的离散图片学习模型中,存在一些局限性。一方面,忽略了生物层面眼睛连续传感和大脑连续学习的机理;另一方面,单纯的图片记忆会导致机器人在岔路、环路等情况下出现无法判断的情况。
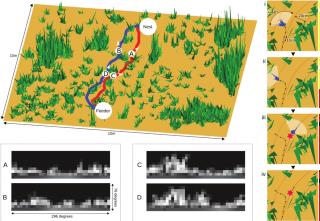
该研究中基于蚂蚁大脑时空记忆学习模型解决了上述两种问题,可在小环境中,视觉标志缺乏或环境元素单一重复的情况下,实现高精度的连续时空记忆学习,该基于视觉的记忆可以用来判断环境的熟悉度,用于机器人循迹和导航。
(来源:Springer)
朱乐表示,在系统精简效率高的智能方面,自然界给研究团队提供了很多优秀的范例,昆虫大脑的简单神经系统和高度灵活鲁棒的智能行为就是很好的学习范例之一。
(来源:Science Robotics)
从结果来看,该课题组着重对比了基于视觉匹配的视觉位置识别(Visual Place Recognition, 简称 VPR)算法 SeqSLAM,显示出更加优越的鲁棒性。
大量的机器人研究实验在纯仿真平台或室内环境下测验,在易控环境下的测试结果,获得的算法表象并不适用于复杂的户外自然环境。
“对机器人直接在苗圃中真实的树木养殖环境中,进行了路径熟悉度的测试。结果表明,我们的算法可以成为农业和林业等环境下机器人的一个模块。”朱乐说。

(来源:Science Robotics)
更重要的是,从生物灵感启发而来,该研究中基于视觉熟悉度的循迹算法可发展成为不需要 GPS 和地图的导航机制,未来有望在极端环境下,例如地下(例如采矿)和水下(例如深海工作环境)发挥作用。
他补充说道:“这种算法甚至有可能在外太空等 GPS 信号不良的情况,或在 GPS 精度不能达到要求的建筑内部环境中使用。”
值得关注的是,基于蚂蚁行为学的导航机制只需要学习路径的熟悉度就可以完成循迹,并实现在多点之间进行往返,不需要构建全局地图和实时精准定位进行导航。
这对传感、计算和存储的要求大大降低。在环境面积很大的情况下,构建地图极其消耗资源的环境中,有望发挥极大的作用。

博士四年,登上机器人领域的“终极梦想”期刊
一直以来,朱乐感兴趣的课题是从生物启发获得灵感,来改造和提升机器人。例如,硕士期间他研究六足机器人的运动控制,模仿竹节虫的爬行。
博一时通过阅读文献以及与博士导师讨论,确立了研究这个问题的动机:神经学上无法解释的新连接,直接进行生物实验极其困难;基于单帧图片的视觉导航机制,从生物学上来说不够完备,从性能表现上来说不够完善;如何在有限算力的情况下实现快速计算性能鲁棒的智能机器人。
通过建模和仿真获取了初步结果,并在仿真环境下验证假设。由于出色的创新性,朱乐在仿生学的著名会议 Living Machines 上做口头演讲,发表了第一篇论文。
但是,当时的方法论并不完善,一些问题也随着而来。“其中,最大的问题是脉冲神经网络在传统计算机 CPU 和 GPU 的环境下,不仅速度缓慢且功耗高,无法在移动机器人实时输入输出闭环控制和低功耗的要求。”朱乐表示。
博二博三开始,他开始研究如何使用类脑计算机来加速模型的计算,最终通过多方调查和研究,确立了使用曼彻斯特大学的 SpiNNaker 系统。
研究期间由于发生疫情,无法进入实验室开展实验,导致进度极其缓慢。“无奈之下,我带了一部分机器人硬件回到中国,在家乡的苗圃中找到最佳的实验环境。就这样,在脱离实验室环境的前提下开展部分实验,并克服重重困难获得大量的实验数据。”他回忆道。
博三后期是完善实验以及调参优化实验结果的过程。由于脉冲神经网络的学习是一个“老大难”的问题,由于脉冲神经网络的不可导性,无法使用传统神经网络的反向递推和梯度下降进行调参。
于是,他从生物实际性出发,搜集了大量生物神经元的数据来确定模型的基础参数,然后通过计算和手动调参的方法优化剩余参数,最终使模型的性能达到了优秀水平。
该过程虽然对计算资源要求不高,但是实践过程耗时、耗力。尤其对类脑计算平台的使用,由于并非商业产品而是实验室的研究样机,该机器的硬件和软件对于新手都非常不友好。
朱乐回忆道:“出现 bug 以后需要联系合作实验室一起帮忙 debug,反复进行远程调试,这期间也感谢曼大实验室的相关人员的耐心和热情,才能够促成我们实验的顺利进行。”
在博四期间,朱乐带着初步成果参加了很多国际会议,每次都会收到相关领域学者的积极肯定和反馈。经讨论,他和导师决定冲击机器人领域的“终极梦想”——顶刊 Science Robotics。

图丨相关论文(来源:Science Robotics)
最终,相关论文以《事件相机在草径上的神经形态序列学习》(Neuromorphic sequence learning with an event camera on routes through vegetation)为题发表在 Science Robotics[1]。爱丁堡大学朱乐博士为论文第一作者兼通讯作者。
审稿人对该论文评价称:“在我看来,这篇论文将形成坚实的基础,也许会为未来更先进的研究覆盖更广的范围,并在控制回路中使用神经形态硬件。”
参考资料:
1.Zhu,L. et al. Neuromorphic sequence learning with an event camera on routes through vegetation. Science Robotics 8, 82(2023).
2.Ardin, P., Peng, F., Mangan, M., Lagogiannis, K., & Webb, B. (2016). Using an insect mushroom body circuit to encode route memory in complex natural environments. PLoS computational biology, 12(2), e1004683.
3.Kagioulis, E., Philippides, A., Graham, P., Knight, J.C., Nowotny, T. (2020). Insect Inspired View Based Navigation Exploiting Temporal Information. In: Vouloutsi, V., Mura, A., Tauber, F., Speck, T., Prescott, T.J., Verschure, P.F.M.J. (eds) Biomimetic and Biohybrid Systems. Living Machines 2020. Lecture Notes in Computer Science(), vol 12413. Springer, Cham.
相关推荐



- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。
热门文章