上海证券报
2025-03-24
上海证券报
2025-03-24 

人形机器人新消息
仿真平台“格物”正式发布。
3月21日,作为国家级战略科技力量的重要部署,国家地方共建人形机器人创新中心联合上海大学、清华大学,共同发布具身智能仿真平台——“格物”。“格物”在技术上的核心突破在于,其基于通用强化学习框架与模型自动化适配技术,用一套代码即可覆盖百余款机器人,让新机器人导入即训练,无需重新编程。
“格物”的愿景是成为机器人强化学习领域的标杆平台,通过开源协作与模块化设计,降低技术门槛,吸引更多开发者加入创新行列。国家地方共建人形机器人创新中心负责人表示:“‘格物’不仅是仿真工具,更是推动机器人技术民主化的基础设施。我们期待与全球开发者共建开放生态,赋能各领域的智能化转型。”
让人形机器人加速从实验室走向产业
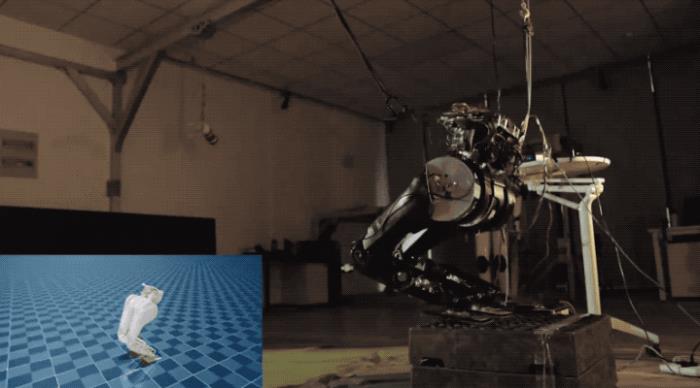
目前,“格物”已成功应用于多款机器人原型开发。在近期测试中,搭载该平台的双足机器人Tinker展示了稳健的行走与抗扰能力,四足机器人Go2则实现了敏捷跳跃与动态平衡控制。
此外,平台支持机器人结构优化,如通过调整腿长、关节偏转等参数探索性能极限,为产品设计提供数据支撑。
拆解其核心功能,“格物”仿真平台基于Unity RL Playground 强化学习框架打造,支持从仿真训练到真实硬件部署的全流程自动化,具体包括:
第一,一键式训练,用户仅需导入机器人模型(URDF文件),平台即可自动优化奖励函数并生成运动策略,将传统耗时数周的开发周期缩短至分钟级。
第二,多模态运动学习,支持双足、四足、轮式等多样化机器人形态,可自主切换行走、奔跑、跳跃等复杂动作,适应家庭服务、工业巡检、灾害救援等多场景需求。
第三,极限性能测试,模拟极端地形、高速运动及重载环境,助力机器人设计优化与形态进化,显著提升硬件方案的可靠性与适应性。
第四,Sim2Real(从模拟环境中训练好的模型迁移到现实环境中的过程)无缝迁移,通过高精度状态对齐工具与在线学习模块,确保仿真策略可快速部署至真实机器人,解决“虚拟与现实鸿沟”难题。
在业内看来,平台创新性地引入前馈引导的强化学习技术与自适应课程学习算法,极大提升策略学习效率。“格物”的发布标志着我国在人形机器人仿真领域迈出关键一步,其通用性与易用性将大幅降低研发门槛,加速创新成果落地。
设立开放基金
推动人形机器人基础研究与前沿探索
科技创新离不开资金支持。为进一步推动人形机器人与具身智能领域的创新发展,国地中心围绕相关基础研究和应用技术研究项目,特设立开放基金,主要面向国内高校、科研机构、企业的优秀青年学者,资助相关研究团队在相关领域开展基础研究与前沿探索。
记者从活动现场获悉,国地中心开放基金围绕平台技术、具身智能、数据集、训练场四大领域及细分17个资助方向。资助方向具体包括五指灵巧手智能感知系统、高可靠机器人能源动力系统、决策大模型研究、力触数据采集与应用等关键领域。
在申报要求上,该项目经费额度为30万—50万元/项,研究周期一般为一年。同时,国地中心开放基金项目不得重复申报,已在国家或地方等其他途径申请科研立项的不予资助。
在流程方面,申请人可以在2025年4月30日前提交申请书。2025年6月中旬前,基金发布方组织项目申请书评审,择优确定资助对象。2025年7月底前,完成立项批复,国地中心与资助对象所在单位签订合同。
(文章来源:上海证券报)
相关推荐



- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。