

 新火种
2024-12-11
新火种
2024-12-11 


「SeeVideo,Get3D」,智源开源无标注视频学习3D生成模型See3D
近日,著名 AI 学者、斯坦福大学教授李飞飞团队 World Labs 推出首个【空间智能】模型,仅输入单张图片,即可生成一个逼真的 3D 世界,这被认为是迈向空间智能的第一步。
几乎同时,国内智源研究院推出了首个利用大规模无标注的互联网视频学习的 3D 生成模型 See3D---See Video, Get 3D。不同于传统依赖相机参数(pose-condition)的 3D 生成模型,See3D 采用全新的视觉条件(visual-condition)技术,仅依赖视频中的视觉线索,生成相机方向可控且几何一致的多视角图像。这一方法不依赖于昂贵的 3D 或相机标注,能够高效地从多样化、易获取的互联网视频中学习 3D 先验。See3D 不仅支持零样本和开放世界的 3D 生成,还无需微调即可执行 3D 编辑、表面重建等任务,展现出在多种 3D 创作应用中的广泛适用性。
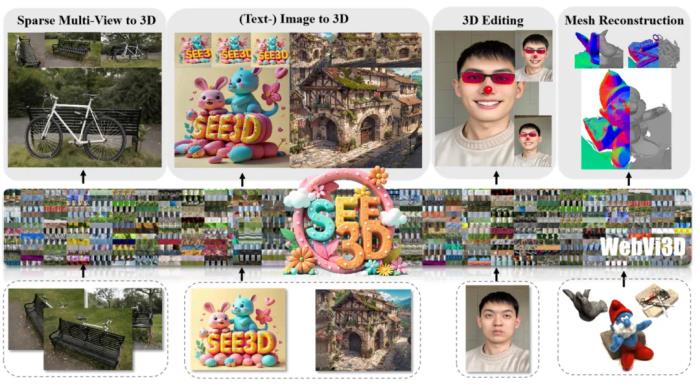
See3D 支持从文本、单视图和稀疏视图到 3D 的生成,同时还可支持 3D 编辑与高斯渲染。相关的模型、代码、Demo 均已开源,更多技术细节请参考 See3D 论文。
论文地址: https://arxiv.org/abs/2412.06699项目地址: https://vision.baai.ac.cn/see3d效果展示1. 解锁 3D 互动世界:输入图片,生成沉浸式可交互 3D 场景,实时探索真实空间结构;
实时 3D 交互(备注:为了实现实时交互式渲染,当前对 3D 模型和渲染过程进行了简化,离线渲染真实效果更佳)2. 基于稀疏图片的 3D 重建:输入稀疏的 (3-6 张) 图片,模型可生成一个精细化的 3D 场景。

基于 6 张视图的 3D 重建

基于 3 张视图的 3D 重建3. 开放世界 3D 生成:根据文本提示,生成一副艺术化的图片,基于此图片,模型可生成一个虚拟化的 3D 场景。
开放世界 3D 生成样例4. 基于单视图的 3D 生成:输入一张真实场景图片,模型可生成一个逼真的 3D 场景。

基于单张图片的 3D 生成研究动机3D 数据具有完整的几何结构和相机信息,能够提供丰富的多视角信息,是训练 3D 模型最直接的选择。然而,现有方法通常依赖人工设计(designed artists)、立体匹配(stereo matching)或运动恢复结构(Structure from Motion, SfM)等技术来收集这些数据。尽管经过多年发展,当前 3D 数据的积累规模依然有限,例如 DLV3D (0.01M)、RealEstate10K (0.08M)、MVImgNet (0.22M) 和 Objaverse (0.8M)。这些数据的采集过程不仅耗时且成本高昂,还可能难以实施,导致其数据规模难以扩展,无法满足大规模应用的需求。与此不同,人类视觉系统无需依赖特定的 3D 表征,仅通过连续多视角的观察即可建立对 3D 世界的理解。单帧图像难以实现这一点,而视频因其天然包含多视角关联性和相机运动信息,具备揭示 3D 结构的潜力。更重要的是,视频来源广泛且易于获取,具有高度的可扩展性。基于此,See3D 提出 “See Video, Get 3D” 的理念,旨在通过视频中的多视图信息,让模型像人类一样,学习并推理物理世界的三维结构,而非直接建模其几何形态。方法介绍为了实现可扩展的 3D 生成,See3D 提供了一套系统化的解决方案,具体包括:1)数据集:团队提出了一个视频数据筛选流程,自动去除源视频中多视角不一致或观察视角不充分的视频,构建了一个高质量、多样化的大规模多视角图像数据集 WebVi3D。该数据集涵盖来自 1600 万个视频片段的 3.2 亿帧图像,可通过自动化流程随互联网视频量的增长而不断扩充。
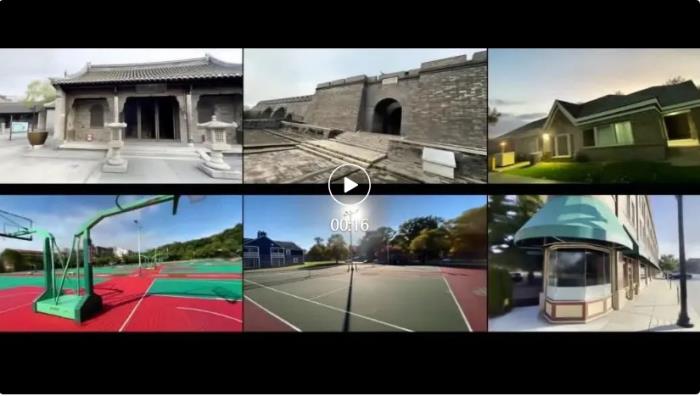
WebVi3D 数据集样本展示
2)模型:标注大规模视频数据的相机信息成本极高,且在缺乏显式 3D 几何或相机标注的情况下,从视频中学习通用 3D 先验是更具挑战的任务。为解决这一问题,See3D 引入了一种新的视觉条件 —— 通过向掩码视频数据添加时间依赖噪声,生成一种纯粹的 2D 归纳视觉信号。这一视觉信号支持可扩展的多视图扩散模型(MVD)训练,避免对相机条件的依赖,实现了 “仅通过视觉获得 3D” 的目标,绕过了昂贵的 3D 标注。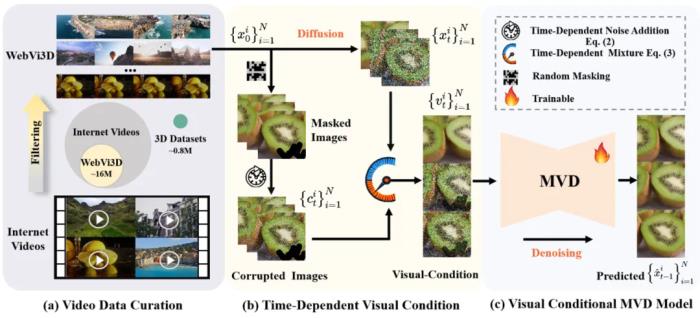
See3D 方法展示3)3D 生成框架:See3D 学到的 3D 先验能够使一系列 3D 创作应用成为可能,包括基于单视图的 3D 生成、稀疏视图重建以及开放世界场景中的 3D 编辑等, 支持在物体级与场景级复杂相机轨迹下的长序列视图的生成。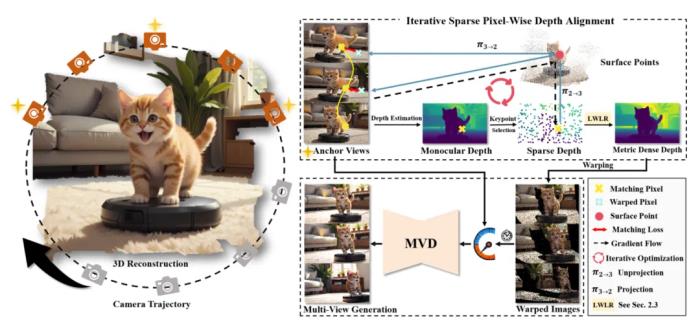
基于 See3D 的多视图生成优势a) 数据扩展性:模型的训练数据源自海量互联网视频,相较于传统 3D 数据集,构建的多视图数据集 (16M) 在规模上实现了数量级的提升。随着互联网的持续发展,该数据集可持续扩充,进一步增强模型能力的覆盖范围。b)相机可控性:模型可支持在任意复杂的相机轨迹下的场景生成,既可以实现场景级别的漫游,也能聚焦于场景内特定的物体细节,提供灵活多样的视角操控能力。c) 几何一致性:模型可支持长序列新视角的生成,保持前后帧视图的几何一致性,并遵循真实三维几何的物理规则。即使视角轨迹发生变化,返回时场景依然保持高逼真和一致性。总结通过扩大数据集规模,See3D 为突破 3D 生成的技术瓶颈提供了新的思路,所学习到的 3D 先验为一系列 3D 创作应用提供了支持。希望这项工作能够引发 3D 研究社区对大规模无相机标注数据的关注,避免高昂的 3D 数据采集成本,同时缩小与现有强大闭源 3D 解决方案之间的差距。
相关推荐




- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。










