新火种
2024-01-04
新火种
2024-01-04 



逐际动力首度公开人形机器人动态测试!率先实现基于实时感知动态上楼梯

作者 | ZeR0
编辑 | 漠影
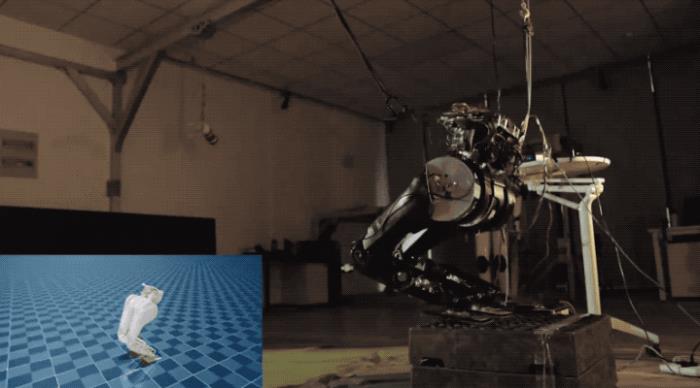
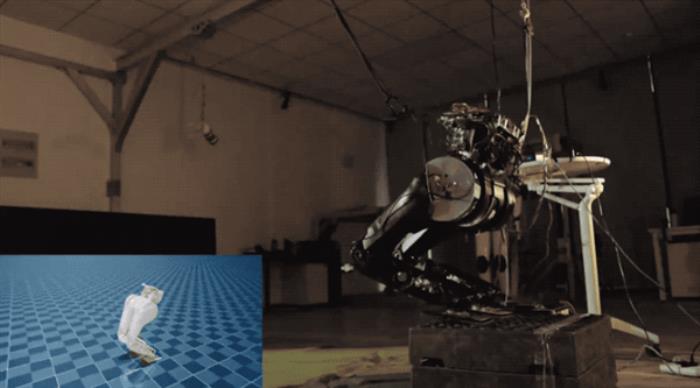
智东西12月28日报道,今日,深圳机器人公司逐际动力首次公开人形机器人的动态测试,机器人代号为「星途CL-1」。
星途CL-1在国内率先实现了人形机器人从实时地形感知、步态规划,到全身控制的全栈闭环,动态完成上楼梯、下斜坡和室内外行走等复杂场景。
在测试中,逐际动力人形机器人星途CL-1实时感知脚下地形,主动调整步态,平顺地从平地踏上台阶,并完成动态上楼梯,动作平稳流畅;然后又稳稳当当地走下了15度的斜坡。
星途CL-1更从室内走到了户外,在不同环境下进行运动测试,从下午一直到傍晚,动态表现同样稳定出色。
总体来看,星途CL-1具有4大亮点:
1、主动感知环境:离散地形一目了然
实时环境感知是人形机器人演进的核心技术。逐际动力推出的星途CL-1率先实现了上楼梯、下斜坡等运动,在国内率先打通基于感知的运动控制在人形机器人上的应用。
在运动控制算法和硬件的基础上,星途CL-1增加了先进的感知算法,实现感知、控制、硬件的全回路打通,让人形机器人突破盲走的局限,实现与复杂地形实时的交互运动。
2、先进的硬件设计:全身动态运动
逐际动力先进的硬件设计方案更好地释放人形机器人复杂的双臂+双腿结构的全身运动能力,是打造一流的通用移动操作机器人平台的重要基础。
该公司专注解决机器人领域最难的足式本体问题,其全自研高性能关节具备优异的抗冲击性能、精准且快速的扭矩控制能力。
在确保高性能的同时,逐际动力的设计方案也兼顾了生产制造的成本和效率优化,为整机的批量化生产奠定了基础。
3、通用AI算法:释放泛化能力
逐际动力对人形机器人能力的定义是:以人为中心,去人能去的地方、做人能做的事情。
其团队不针对机器人具体的功能、形态和应用场景及其变化而定制不同的算法,不管是手臂或者双腿的运动,是四轮足或者人形机器人,都基于同一套核心算法。
这家机器人公司专注于运动控制算法的研发,希望让人形机器人成为AGI(通用人工智能)在物理世界的最佳载体。
4、前沿技术攻关:人形机器人全尺寸进化
点式双足P1作为最早的形态,为人形机器人运动控制算法的开发和测试提供稳定可靠、高效易用的实践平台,随着软件算法、硬件平台的持续迭代和完善,逐步进化为今天的全尺寸人形机器人。
星途CL-1是逐际动力人形机器人前沿技术攻关的平台,集逐际动力全球顶尖的通用机器人软件算法和硬件设计于一身,作为初代机型,已率先完成感知、控制、硬件的核心技术攻关,是开展具身智能研发的最佳测试平台。
结语:基于先进算法与硬件设计,拟落地To B和To C应用场景
作为国内首款基于实时地形感知动态上楼梯的人形机器人,星途CL-1在测试全过程保持动态运动和全身的协调与平衡,这有赖于逐际动力先进的运动控制和AI算法,以及基于软件自研的高性能关节。
随着技术不断迭代,逐际动力的人形机器人将陆续投入到危险场景、高端服务、汽车制造和家庭服务等To B和To C的应用场景。
相关推荐


- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。