新火种
2023-12-05
新火种
2023-12-05 


计算机视觉的十大算法:打开视觉之门的钥匙
"计算机视觉的十大算法:打开视觉之门的钥匙"
在计算机科学中,计算机视觉是一个日益重要的领域。它涉及到许多复杂的算法和技术,用于解析和理解图像和视频中的内容。以下是计算机视觉中的十大算法,这些算法在图像处理、目标检测、图像识别、场景理解等领域发挥着关键作用。
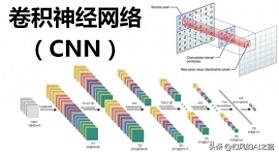
卷积神经网络(Convolutional Neural Networks, CNN)
卷积神经网络是计算机视觉中最著名的算法之一,它已被广泛应用于图像分类、目标检测和识别、人脸识别等任务。CNN通过学习和识别图像中的特征,能够有效地处理和分析图像数据。
支持向量机(Support Vector Machine, SVM)
支持向量机是一种监督学习算法,常用于分类和回归问题。在计算机视觉中,SVM被广泛应用于图像分类和目标检测任务。通过将图像特征映射到高维空间,SVM能够学习到更复杂的分类边界。
决策树(Decision Tree)
决策树是一种非参数的机器学习算法,它可以用于分类和回归问题。在计算机视觉中,决策树被用于图像分类和目标检测任务。通过将图像特征作为输入,决策树可以学习到分类的规则和边界。
随机森林(Random Forest)
随机森林是一种基于决策树的集成学习算法。通过将多个决策树的结果组合起来,随机森林可以获得更好的分类性能。在计算机视觉中,随机森林被广泛应用于目标检测和图像分类任务。
K-最近邻算法(K-Nearest Neighbor, KNN)
K-最近邻算法是一种基于实例的学习算法,常用于分类和回归问题。在计算机视觉中,KNN被用于图像分类、目标检测和人脸识别等任务。通过比较测试样本与训练样本之间的距离,KNN可以找到最接近的邻居并对其进行分类。
贝叶斯分类器(Bayesian Classifier)
贝叶斯分类器是一种基于贝叶斯定理的监督学习算法。在计算机视觉中,贝叶斯分类器被用于图像分类和目标检测任务。通过计算每个类别的概率分布,贝叶斯分类器可以确定测试样本的类别。
感知机算法(Perceptron Algorithm)
感知机算法是一种线性分类算法,可以用于二分类问题。在计算机视觉中,感知机算法被用于图像分类和目标检测任务。通过学习和优化权重参数,感知机算法可以找到一个能够将不同类别数据点分开的超平面。
区域卷积神经网络(Region-based Convolutional Networks, R-CNN)
区域卷积神经网络是一种基于CNN的目标检测算法。R-CNN通过先验框(anchor box)来定位目标物体,然后使用CNN来提取特征并进行分类。R-CNN的出现为计算机视觉领域带来了革命性的变化,它开启了目标检测的新篇章。
YOLO(You Only Look Once)系列算法
YOLO是一种实时目标检测算法,它能够实现快速、准确的目标检测。YOLO通过将目标检测任务转换为单次前向传递的回归问题,实现了高效的检测性能。YOLO系列算法不断发展和改进,为实时视觉应用提供了强大的支持。
SSD(Single Shot MultiBox Detector, SSD)系列算法
SSD是一种基于单次前向传递的目标检测算法,它与YOLO类似但有所不同。SSD使用单个CNN来同时提取特征和进行目标检测,从而实现了更高的准确性和效率。SSD系列算法不断优化和发展,成为了计算机视觉领域中重要的目标检测算法之一。
相关推荐




- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。
热门文章