新火种
2025-01-12
新火种
2025-01-12 


中国科大研发“章鱼”触手机器人能抓取任意物体

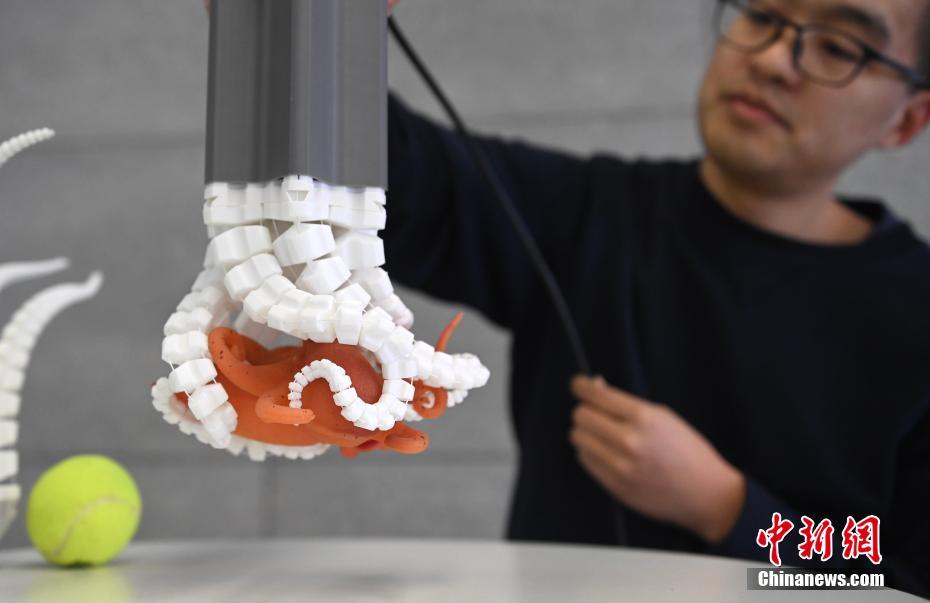
12月28日,在中国科学技术大学人工智能物联网(AIoT)实验室,科研人员正在演示新型螺旋软体机器人抓取物体的能力。近期,中国科学技术大学尼克(Nikolaos Freris)特任教授课题组及其合作者魏熹特任副研究员,在软体机器人领域取得重要进展成果,基于对自然界多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)形态与运动的系统观察及数学模型抽象,研发了一系列不同尺度(长度从厘米到米)与材质的螺旋机器人原型机。该研究有望推动软体机器人发展成熟,为复杂抓取、人机交互、低空经济产业等场景提供技术支持与创新方案。中新社记者 韩苏原 摄

12月28日,在中国科学技术大学人工智能物联网(AIoT)实验室,科研人员正在展示新型螺旋软体机器人,该机器人可通过3D打印实现快速,低成本制造。近期,中国科学技术大学尼克(Nikolaos Freris)特任教授课题组及其合作者魏熹特任副研究员,在软体机器人领域取得重要进展成果,基于对自然界多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)形态与运动的系统观察及数学模型抽象,研发了一系列不同尺度(长度从厘米到米)与材质的螺旋机器人原型机。该研究有望推动软体机器人发展成熟,为复杂抓取、人机交互、低空经济产业等场景提供技术支持与创新方案。中新社记者 韩苏原 摄
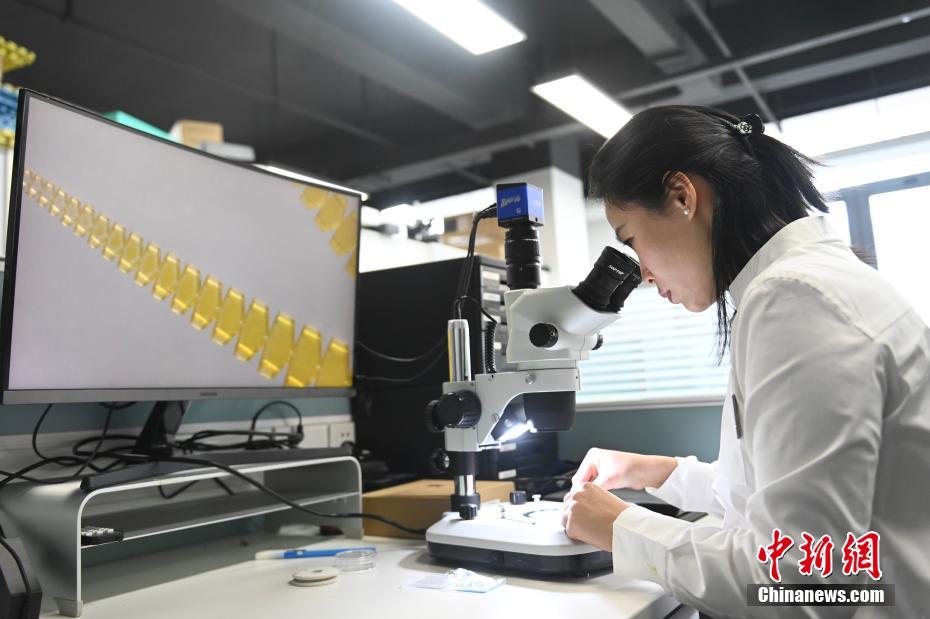
12月28日,在中国科学技术大学人工智能物联网(AIoT)实验室,科研人员通过显微镜观察长度10mm,尖端直径0.14mm的微型螺旋机器人。近期,中国科学技术大学尼克(Nikolaos Freris)特任教授课题组及其合作者魏熹特任副研究员,在软体机器人领域取得重要进展成果,基于对自然界多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)形态与运动的系统观察及数学模型抽象,研发了一系列不同尺度(长度从厘米到米)与材质的螺旋机器人原型机。该研究有望推动软体机器人发展成熟,为复杂抓取、人机交互、低空经济产业等场景提供技术支持与创新方案。中新社记者 韩苏原 摄
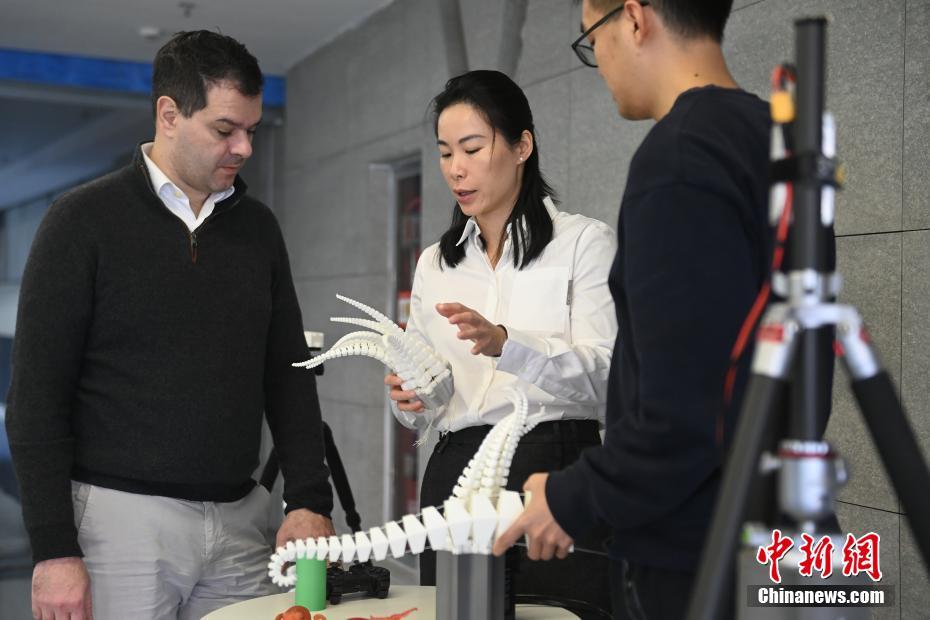
12月28日,在中国科学技术大学人工智能物联网(AIoT)实验室,科研团队正在工作中。近期,中国科学技术大学尼克(Nikolaos Freris)特任教授课题组及其合作者魏熹特任副研究员,在软体机器人领域取得重要进展成果,基于对自然界多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)形态与运动的系统观察及数学模型抽象,研发了一系列不同尺度(长度从厘米到米)与材质的螺旋机器人原型机。该研究有望推动软体机器人发展成熟,为复杂抓取、人机交互、低空经济产业等场景提供技术支持与创新方案。中新社记者 韩苏原 摄

12月28日,在中国科学技术大学人工智能物联网(AIoT)实验室,科研人员正在演示新型螺旋软体机器人的灵活性。近期,中国科学技术大学尼克(Nikolaos Freris)特任教授课题组及其合作者魏熹特任副研究员,在软体机器人领域取得重要进展成果,基于对自然界多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)形态与运动的系统观察及数学模型抽象,研发了一系列不同尺度(长度从厘米到米)与材质的螺旋机器人原型机。该研究有望推动软体机器人发展成熟,为复杂抓取、人机交互、低空经济产业等场景提供技术支持与创新方案。中新社记者 韩苏原 摄

12月28日,在中国科学技术大学人工智能物联网(AIoT)实验室,科研人员通过显微镜观察长度10mm,尖端直径0.14mm的微型螺旋机器人。近期,中国科学技术大学尼克(Nikolaos Freris)特任教授课题组及其合作者魏熹特任副研究员,在软体机器人领域取得重要进展成果,基于对自然界多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)形态与运动的系统观察及数学模型抽象,研发了一系列不同尺度(长度从厘米到米)与材质的螺旋机器人原型机。该研究有望推动软体机器人发展成熟,为复杂抓取、人机交互、低空经济产业等场景提供技术支持与创新方案。中新社记者 韩苏原 摄
相关推荐




- 免责声明
- 本文所包含的观点仅代表作者个人看法,不代表新火种的观点。在新火种上获取的所有信息均不应被视为投资建议。新火种对本文可能提及或链接的任何项目不表示认可。 交易和投资涉及高风险,读者在采取与本文内容相关的任何行动之前,请务必进行充分的尽职调查。最终的决策应该基于您自己的独立判断。新火种不对因依赖本文观点而产生的任何金钱损失负任何责任。
热门文章